You are here: Start » AVL.NET » Function Reference » Computer Vision » Hough Transform » AVL.DetectSegments
AVL.DetectSegments
Finds segments in an image using Hough Transform.
| Namespace: | AvlNet |
|---|---|
| Assembly: | AVL.NET.dll |
Syntax
public static void DetectSegments ( AvlNet.Image inImage, NullableRef<AvlNet.Region> inRoi, float inAngleResolution, float inMinAngleDelta, float inMinDistance, float inMinLength, float inMinScore, float inEdgeThreshold, IList<AvlNet.Segment2D> outSegments, AvlNet.Image diagGradientMagnitudeImage, AvlNet.Image diagScoreImage )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 | inImage | AvlNet.Image | Input image. | ||
| inRoi | AvlNet.NullableRef<AvlNet.Region> | Input region of interest. Default value: atl::NIL. | ||
| inAngleResolution | float | <0.1f, 180.0f> | 1.0f | Resolution of segments' orientation. Default value: 1.0f. |
| inMinAngleDelta | float | <0.0f, INF> | 20.0f | Minimum angle between two segments. Default value: 20.0f. |
| inMinDistance | float | <0.0f, INF> | 20.0f | Minimum distance between two segments. Default value: 20.0f. |
| inMinLength | float | <0.0f, INF> | 20.0f | Minimum segment length. Default value: 20.0f. |
| inMinScore | float | <0.0f, INF> | 20.0f | Minimum matching score. Default value: 20.0f. |
| inEdgeThreshold | float | 10.0f | Minimum accepted edge magnitude. Default value: 10.0f. | |
 | outSegments | System.Collections.Generic.IList<AvlNet.Segment2D> | Output segments. | ||
 | diagGradientMagnitudeImage | AvlNet.Image | Visualized gradients magnitude of an input image. | ||
| diagScoreImage | AvlNet.Image | Calculated score for each pixel of an input image. |
Description
The operation detects straight edges in the inImage using the Hough Transform approach and treats them as segments by tracing gradients along lines. The output array is ordered from best matching to worst matching results.
The parameter inAngleResolution specifies the precision of detected lines' orientations. Value of n means the filter will be able to reliably distinguish lines in n-degree increments.
Parameters inMinAngleDelta and inMinDistance are used for neighbouring results suppression. inMinAngleDelta specifies the minimum angle between two lines while inMinDistance specifies the minimum distance between two parallel lines. Parameter inMinLength limits the length of segments (in pixels), suppressing too short segments.
The orientations of the resulting segments are always between 0 and 180 degrees.
Examples
 |
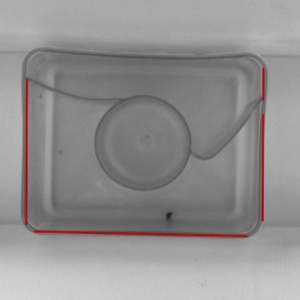 |
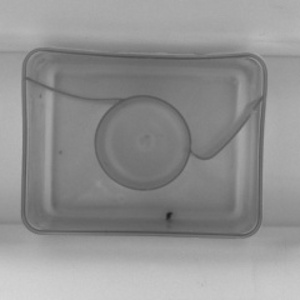
DetectSegments performed on the sample image with inMinScore = 0.5, inMinLength = 25.
Remarks
Low values of inAngleResolution (under 0.5) may cause high memory consumption and decrease in performance.
Function Overrides
- DetectSegments(Image, Single, Single, Single, Single, Single, Single, IList<Segment2D>)
- DetectSegments(Image, NullableRef<Region>, Single, Single, Single, Single, Single, Single, IList<Segment2D>)