Back to Aurora Vision Library website

Set inMaxRank to larger value to allow detecting paths that lie close to each other.
Set inMaxTurnAngle to larger value when points do not lie precisely on a segment.
Set inMinPointCount to filter out too short paths (useful when some of the input points are noise).
You are here: Start » Function Reference » Geometry 2D » Geometry 2D Fitting » DetectPointSegments
DetectPointSegments
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
| Module: | FoundationPro |
Detect points that lie along multiple segments.
Syntax
C++
C#
Python
void avl::DetectPointSegments ( const atl::Array<avl::Point2D>& inPoints, const float inMaxDistance, const int inMaxRank, atl::Optional<float> inMaxRelativeDistance, const float inMaxTurnAngle, const int inMinPointCount, atl::Array<avl::Segment2D>& outPointSegments, atl::Array<avl::Path>& outPaths )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 |
inPoints | const Array<Point2D>& | Points to connect | ||
|
inMaxDistance | const float | 0.0 -  |
10.0f | Maximum distance between connected points |
|
inMaxRank | const int | 1 - |
4 | Maximum number of neighbour candidates considered when joining points |
|
inMaxRelativeDistance | Optional<float> | 1.0 - |
2.0f | Maximum distance in relation to the shortest distance for a point |
|
inMaxTurnAngle | const float | 0.0 - 90.0 | 5.0f | Maximum angle between consecutive path segments |
|
inMinPointCount | const int | 2 - |
3 | Minimum number of points in one path |
 |
outPointSegments | Array<Segment2D>& | Segments connecting first and last point of each path | ||
|
outPaths | Array<Path>& | Paths of connected points |
Description
Use this filter to detect multiple segments or paths at the same time.
Set inMaxDistance to smaller value to avoid connecting distant points.Set inMaxRank to larger value to allow detecting paths that lie close to each other.
Set inMaxTurnAngle to larger value when points do not lie precisely on a segment.
Set inMinPointCount to filter out too short paths (useful when some of the input points are noise).
Filter returns array of paths as well as segments connecting first and last point of each path.
Examples
Results for input parameters: inMaxDistance = 30, inMaxRank = 4, inMaxTurnAngle = 20, inMinPointCount = 4.

The resulting outPointSegments drawn with the input points. |
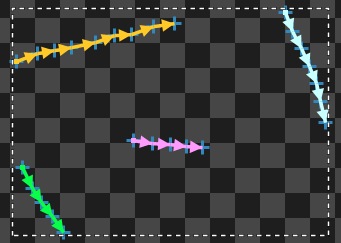
The resulting outPaths drawn with the input points. |
See Also
- FitSegmentToPoints – Approximates points with a segment using selected outliers suppression method.