Back to Aurora Vision Library website

You are here: Start » Function Reference » Geometry 2D » Geometry 2D Fitting » FitSegmentToPoints
FitSegmentToPoints
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
| Module: | FoundationBasic |
Approximates points with a segment using selected outliers suppression method.
Applications: Finding a locally optimal segment. Good enough when the number of outliers is small.
Syntax
C++
C#
Python
void avl::FitSegmentToPoints ( const atl::Array<avl::Point2D>& inPoints, atl::Optional<const avl::Range&> inRange, atl::Optional<avl::MEstimator::Type> inOutlierSuppression, avl::Segment2D& outSegment, atl::Optional<atl::Array<avl::Point2D>&> outInliers = atl::NIL )
Parameters
| Name | Type | Default | Description | |
|---|---|---|---|---|
 |
inPoints | const Array<Point2D>& | ||
|
inRange | Optional<const Range&> | NIL | Determines which array points take part in fitting process |
|
inOutlierSuppression | Optional<MEstimator::Type> | NIL | |
 |
outSegment | Segment2D& | ||
|
outInliers | Optional<Array<Point2D>&> | NIL |
Optional Outputs
The computation of following outputs can be switched off by passing value atl::NIL to these parameters: outInliers.
Read more about Optional Outputs.
Description
The orientation of the resulting outSegment is always between 0 and 180 degrees.
Examples
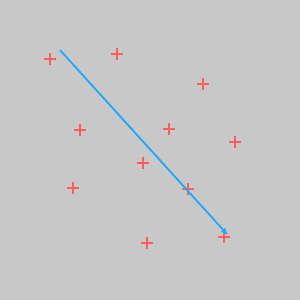 |
The resulting outSegment drawn with the input points, inOutlierSuppression = Auto.