
You are here: Start » Program Examples » Calibration World Coordinates On Original Images
Calibration World Coordinates On Original Images
Aim
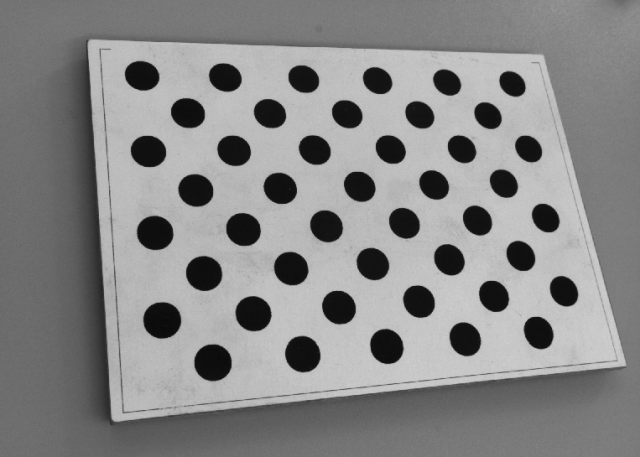
The goal is to measure the distances between the consecutive center points of each circle.
Input
A few images of the circle calibration grid.
Output
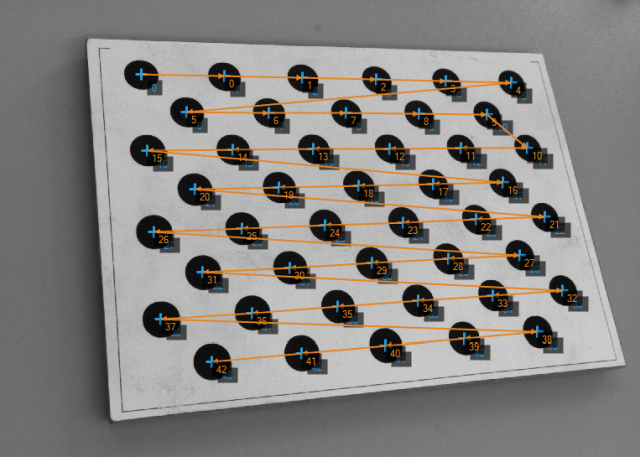
Detected centers of the black circles on the calibration grid and distances between them.
Hints
Black circles are clearly discernible, so it is a good idea to use Region Analysis to find them and their centers, and then to perform rectification using ImagePointsToWorldPlane.
Solution (AVS)
-
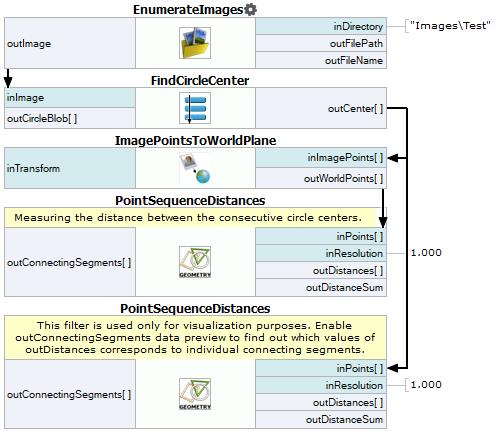
Add the EnumerateImages filter and specify the directory to images in inDirectory.
-
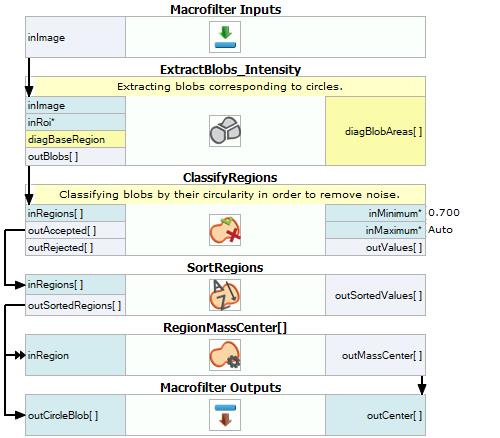
Create a new step macrofilter in which you will produce the algorithm for finding center points. Name it FindCircleCenter. Connect outImage to its inputs.
-
Inside of the macrofilter, add ExtractBlobs_Intensity. Make following changes:
- Set inThresholdParams.MaxIntensity to 53 to separate darker pixels from the background,
- Set inBlobSplittingParams.MinArea to 1000 to remove blobs of lower area.
-
Add the ClassifyRegions filter. Connect outBlobs to inRegions. Set:
-
Add the SortRegions filter. Connect outAccepted to inRegions. Set inFeature to MassCenterY.
-
Add the RegionMassCenter filter and connect outSortedRegions to inRegion. Connect outMassCenter to macrofilter inputs as outCenter. Leave the macrofilter.
-
Back in Main, add the ImagePointsToWorldPlane filter. Connect outCenter to inImagePoints.
-
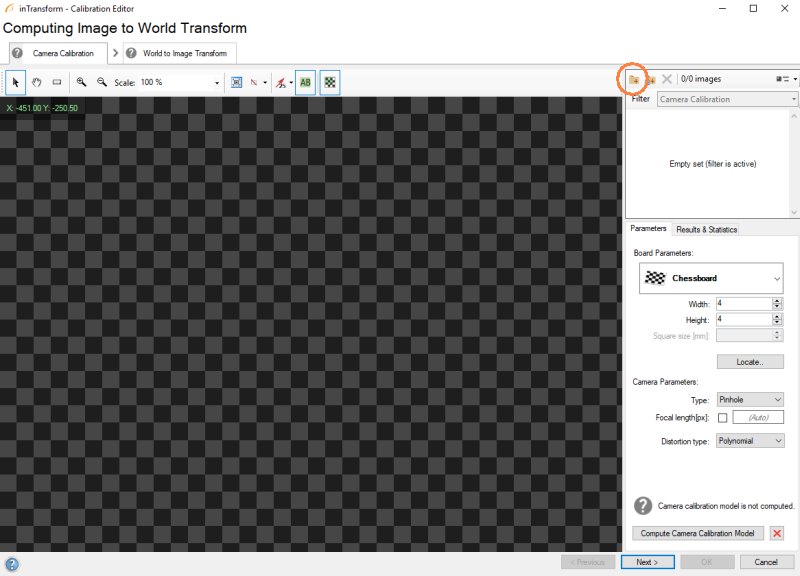
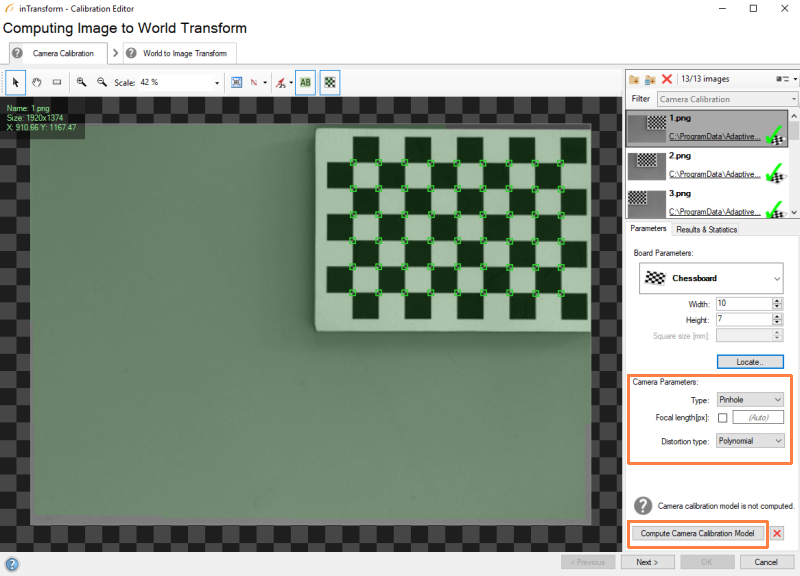
Open the Calibration Editor by clicking on the inTransform input in the Properties window in the bottom left corner. Load images of the calibration grid by clicking on the button circled in orange:
-
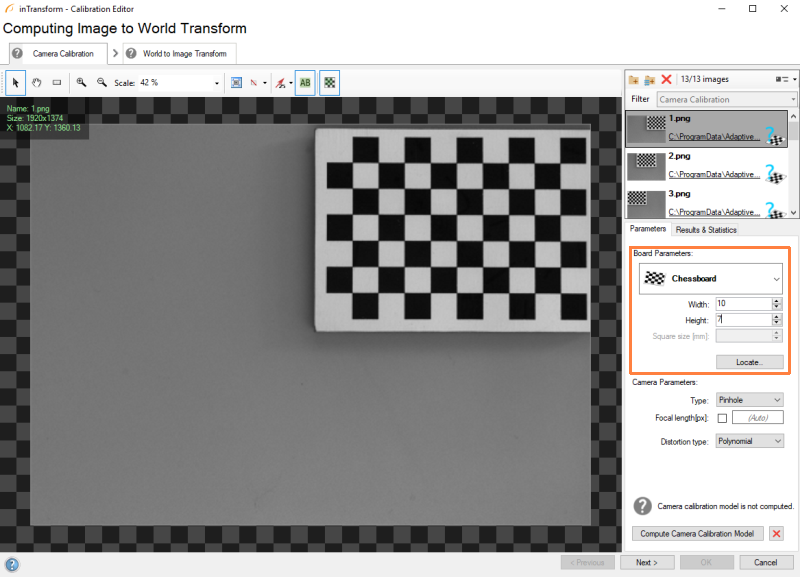
Determine Board Parameters:
- Select a proper calibration grid,
- Specify dimensions - width and height of the calibration grid,
- When you are ready, click Locate.
-
If calibration grid's points are correctly located, you can alternatively adjust Camera Parameters (if necessary). Eventually, click on Compute Camera Calibration Model:
-
If camera calibration model has been successfully computed, click on the Next button. In this step the Image to World Transform is computed. Add at least one image to the Editor:
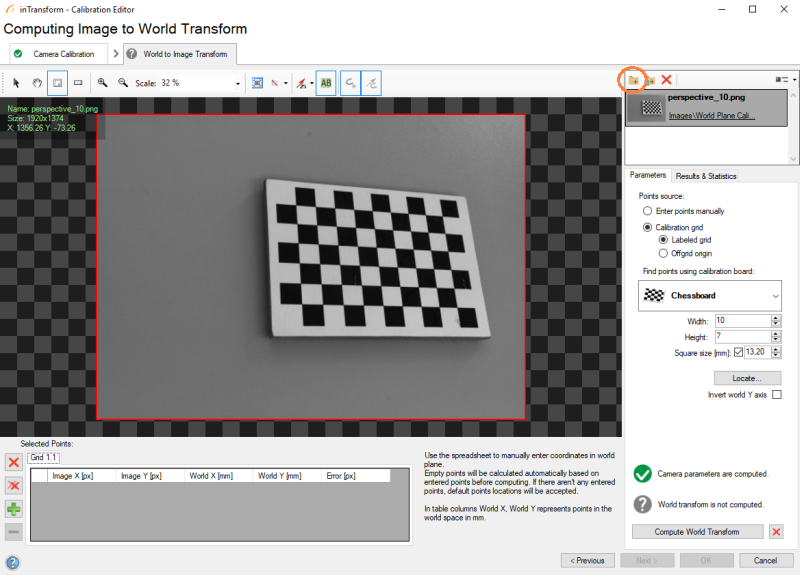
-
Now you can either enter points manually, or use the calibration grid to do it automatically. In this example, the other option is shown. When you are ready, you can click on Locate...:
-
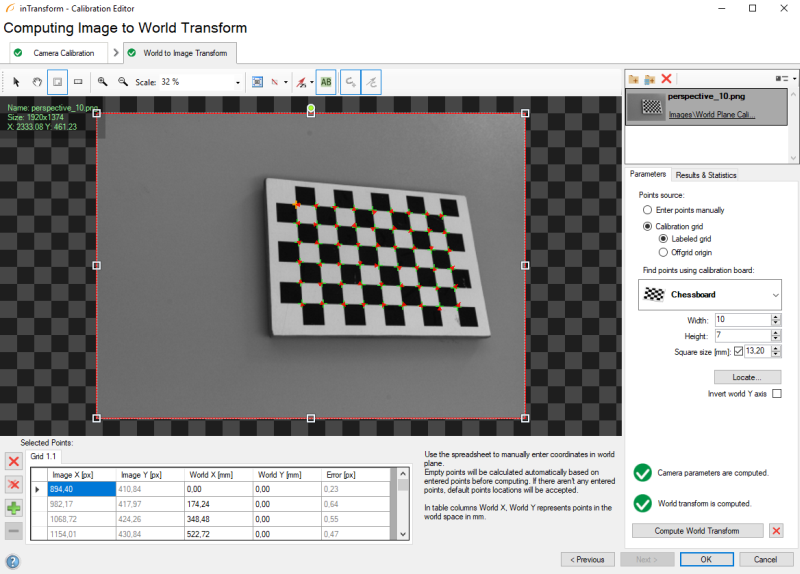
Change the origin segment by setting the Origin point to (0.00, 0.00) and X-axis point to (200.00, 0.00). If no problems have occurred, click on Compute World Transform.
-
After successful computation, the Results & Statistics tab will be prompted. You can leave the Editor by clicking OK:
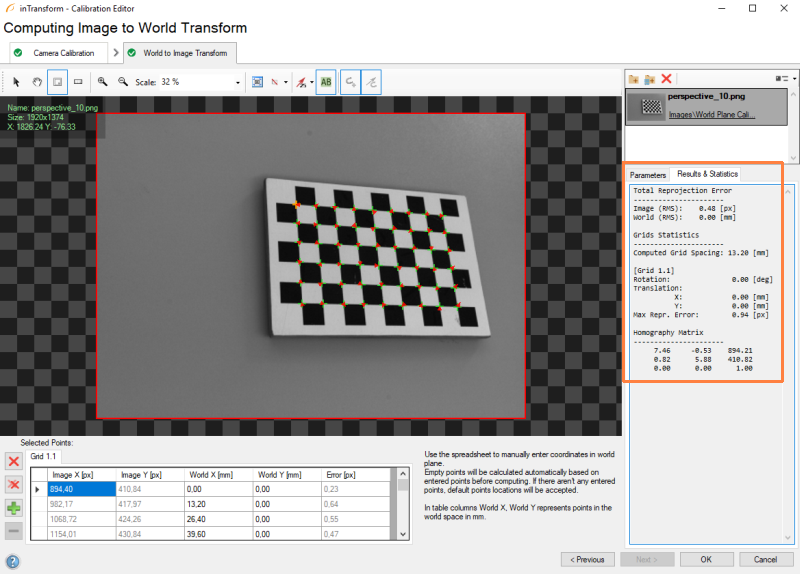
-
Now add the PointSequenceDistances filter and connect outWorldPoints to inPoints. This filter will measure the distance between the consecutive circle centers. If you add another PointSequenceDistances filter and connect outCenter to inPoints, you will observe the connecting segments, but they will not reflect true distances. They will be displayed only for visualization purposes.
Macrofilter Main
Macrofilter FindCircleCenter
Used Filters
| Icon | Name | Description |
|---|---|---|
| ClassifyRegions | Use this filter when to you have an array of regions and you want to select some of them for further processing. | |
| EnumerateImages | Emulates image acquisition with images stored on disk. | |
| ImagePointsToWorldPlane | Undistortion, image to world coordinate transformation. | |
| PointSequenceDistances | Measures the distances between consecutive points of a point sequence. | |
| RegionMassCenter | Computes a point with coordinates equal to the average coordinates of the region's pixels. | |
| SortRegions | Changes the order of regions from the input array accordingly to an ascending/descending sequence of their computed feature values. | |
| ExtractBlobs_Intensity | Segments an image into blobs by thresholding. |
Further Readings
- Camera Calibration and World Coordinates - Detailed information about camera calibration and world coordinates.