You are here: Start » AVL.NET » Function Reference » Computer Vision » Shape Adjustment » AVL.AdjustPathArrayToEdges
AVL.AdjustPathArrayToEdges
Translates, rotates and scales the given contour set to the edges of the input image with subpixel precision.
| Namespace: | AvlNet |
|---|---|
| Assembly: | AVL.NET.dll |
Syntax
C++
C#
public static void AdjustPathArrayToEdges ( AvlNet.Image inImage, IList<AvlNet.Path> inPaths, float? inPointSpacing, AvlNet.CoordinateSystem2D? inAlignment, float inAttractionRadius, AvlNet.AdjustmentMetric inAdjustmentMetric, bool inAdjustTranslation, bool inAdjustRotation, bool inAdjustScale, int inIterationCount, float inBaseGradient, IList<AvlNet.Path> outAdjustedPaths, out AvlNet.CoordinateSystem2D outAlignment )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 | inImage | AvlNet.Image | Input image. | ||
| inPaths | System.Collections.Generic.IList<AvlNet.Path> | Paths to be adjusted. For sparse, synthetic paths the inPointSpacing needs to be specified. | ||
| inPointSpacing | float? | <1.0f, INF> | If set, sampling points of the input path will be equidistant with specified spacing. Useful for increasing density of synthetic, sparse paths. Default value: atl::NIL. | |
| inAlignment | AvlNet.CoordinateSystem2D? | Alignment to be corrected, usually connects to outObject.Alignment of LocateObjects filter. Default value: atl::NIL. | ||
| inAttractionRadius | float | <0.1f, INF> | 2.0f | Expected initial distance between inPaths and edges of the input image. Default value: 2.0f. |
| inAdjustmentMetric | AvlNet.AdjustmentMetric | SegmentDistance | Metric used for path attraction. The SegmentDistance minimizes distances along path normal vectors, and thus adjustment is more accurate. PointDistance_* minimize euclidean distance, adjustment tends to be more stable. Default value: SegmentDistance. | |
| inAdjustTranslation | bool | True | Compute the translation part of adjustment transform. Must be true when using AttractPathTangents estimation method. Default value: True. | |
| inAdjustRotation | bool | True | Compute the rotation part of adjustment transform. Default value: True. | |
| inAdjustScale | bool | False | Compute the scale part of adjustment transform. Default value: False. | |
| inIterationCount | int | <0, 100> | 6 | Number of iterations of internal adjustment algorithm. Default value: 6. |
| inBaseGradient | float | <0.1f, INF> | 1.0f | Threshold for suppression of weak input image gradients. Increase for very noisy images. Default value: 1.0f. |
 | outAdjustedPaths | System.Collections.Generic.IList<AvlNet.Path> | Adjusted output paths. | ||
| outAlignment | AvlNet.CoordinateSystem2D | Corrected alignment - the inAlignment input modified with estimated adjustment parameters. |
Examples
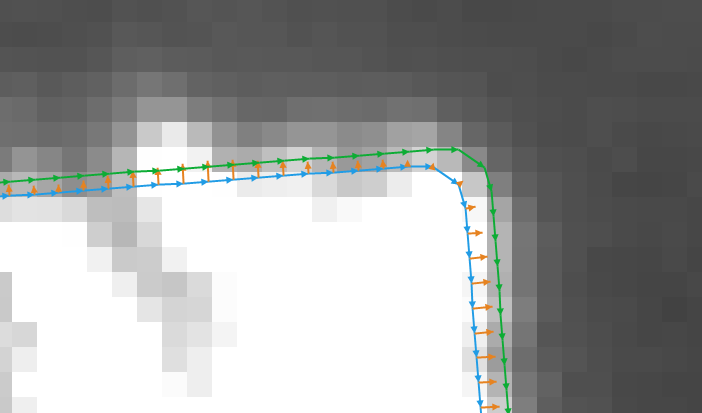
Improving results of template matching. Blue – input paths, orange – attraction vectors, green – corrected paths.
Hardware Acceleration
This operation is optimized for SSSE3 technology for pixels of type: UINT8.
This operation is optimized for AVX2 technology for pixels of type: UINT8.
This operation is optimized for NEON technology for pixels of type: UINT8.
This operation supports automatic parallelization for multicore and multiprocessor systems.
Hardware acceleration settings may be manipulated with Settings class.
Function Overrides
- AdjustPathArrayToEdges(Image, IList<Path>, Single, AdjustmentMetric, Boolean, Boolean, Boolean, Int32, Single, IList<Path>, CoordinateSystem2D)
- AdjustPathArrayToEdges(Image, IList<Path>, Nullable<Single>, Nullable<CoordinateSystem2D>, Single, AdjustmentMetric, Boolean, Boolean, Boolean, Int32, Single, IList<Path>, CoordinateSystem2D, IList<Segment2D>)