
You are here: Start » Function Reference » Computer Vision » Image Segmentation » SegmentImage_Watersheds
SegmentImage_Watersheds
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
| Module: | FoundationBasic |
Computes dark or bright watershed basins of an image.
Applications: A classic algorithm, useful for segmentation of ball-shaped objects like plant seeds, cells or fruits.
Syntax
void avl::SegmentImage_Watersheds ( const avl::Image& inImage, atl::Optional<const avl::Region&> inRoi, const atl::Array<avl::Region>& inMarkers, avl::Polarity::Type inBasinsPolarity, atl::Array<avl::Region>& outBasins )
Parameters
| Name | Type | Default | Description | |
|---|---|---|---|---|
 |
inImage | const Image& | Input image | |
|
inRoi | Optional<const Region&> | NIL | Range of pixels to be processed |
|
inMarkers | const Array<Region>& | Local minima markers | |
|
inBasinsPolarity | Polarity::Type | Whether to look for bright or dark basins | |
 |
outBasins | Array<Region>& |
Requirements
For input inImage only pixel formats are supported: uint8.
Read more about pixel formats in Image documentation.
Description
This filter segments the image into basins based on a set of markers (inMarkers) and a flooding watersheds implementation for grayscale images.
By default a darker pixel is considered lower but that can be changes using the inBasinsPolarity parameter.
Markers have to be computed beforehand. One way to do that is to detect the ridges of the image and threshold it into a single region, Pass the resulting region into the DistanceTransform filter. Then threshold the distance image and split it into blobs.
Examples
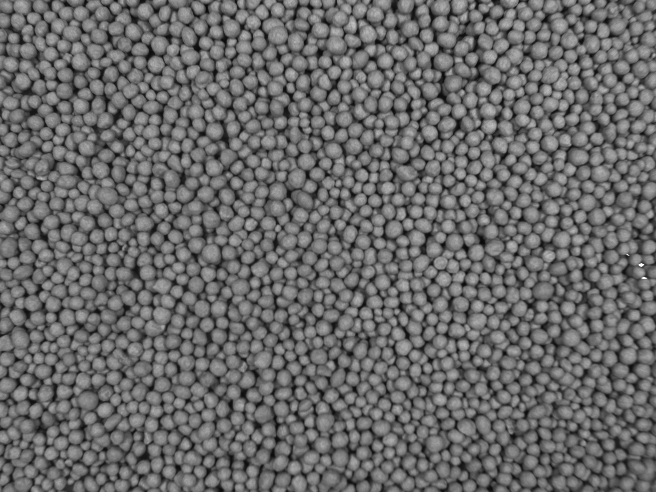 Example image |
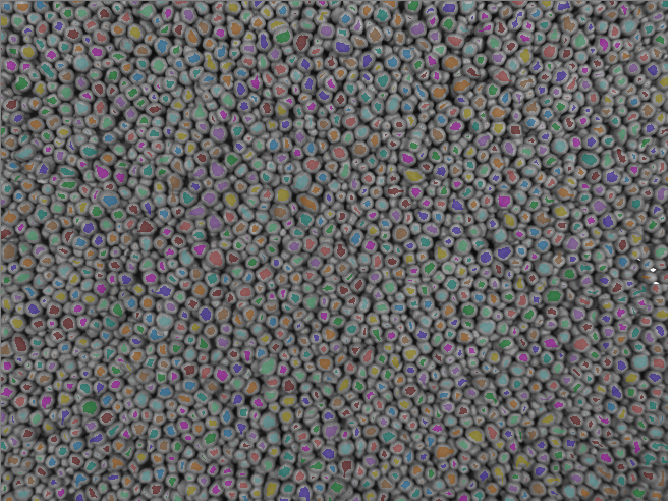 Computed markers |
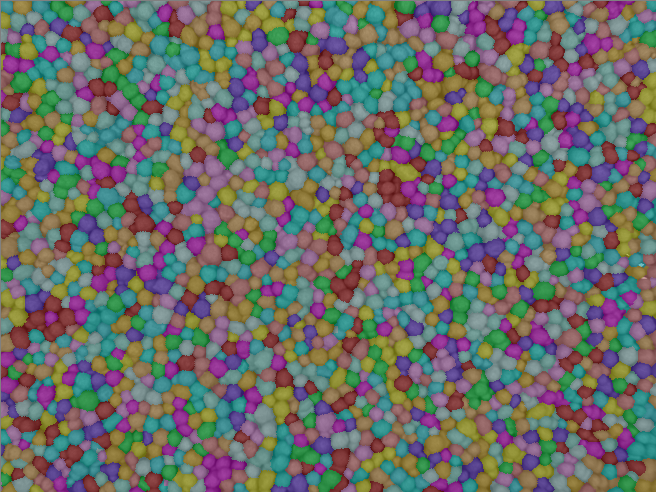 Basins computed with watersheds |
Errors
List of possible exceptions:
| Error type | Description |
|---|---|
| DomainError | No markers present in SegmentImage_Watersheds. |
| DomainError | Not supported inImage pixel format in SegmentImage_Watersheds. Supported formats: UInt8. |
See Also
- DetectRidges_AsRegion – Extracts a pixel-precise region of bright or dark thin lines.
- ThresholdToRegion – Creates a region containing image pixels with values within the specified range.
- DistanceTransform – Computes an image in which the pixel values denote the estimated distances to the nearest bright pixel in the input image.