
Back to Aurora Vision Library website

You are here: Start » Function Reference » Computer Vision » Camera Calibration » DetectCalibrationGrid_Circles
DetectCalibrationGrid_Circles
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
| Module: | Calibration |
Detects an arbitrary size symmetric circle pattern on the image.
Syntax
C++
C#
Python
void avl::DetectCalibrationGrid_Circles ( const avl::Image& inImage, atl::Optional<const avl::Region&> inRoi, float inCircleRadius, float inCircleDetectionThreshold, avl::Polarity::Type inCirclePolarity, atl::Array<avl::AnnotatedPoint2D>& outImageGrid, avl::Region& diagCirclesRegion, atl::Array<avl::Point2D>& diagCircleCandidates )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 |
inImage | const Image& | Input image | ||
|
inRoi | Optional<const Region&> | NIL | Range of pixels to be processed | |
|
inCircleRadius | float | 1.0 -  |
Circle radius measured in input image pixels. | |
|
inCircleDetectionThreshold | float | 0.0 - |
20.0f | Detection threshold (relative to local image patch). |
|
inCirclePolarity | Polarity::Type | Any | Circle intensity with respect to background. | |
 |
outImageGrid | Array<AnnotatedPoint2D>& | Detected grid | ||
 |
diagCirclesRegion | Region& | Image after thresholding, this is the circle detector input. | ||
|
diagCircleCandidates | Array<Point2D>& | Detected circle centers, before the grid construction step. |
Requirements
For input inImage only pixel formats are supported: uint8.
Read more about pixel formats in Image documentation.
Hints
Circles may have holes. This can utilized, for example, for designating some specific coordinates on the calibration board. Note that the hole diameter must be less than a half of the circle diameter.
Examples
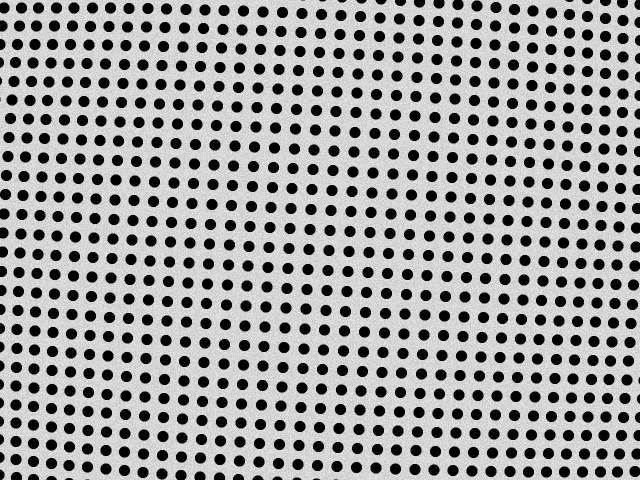
Input image for DetectCalibrationGrid_Circles executed with inCircleRadius = 5
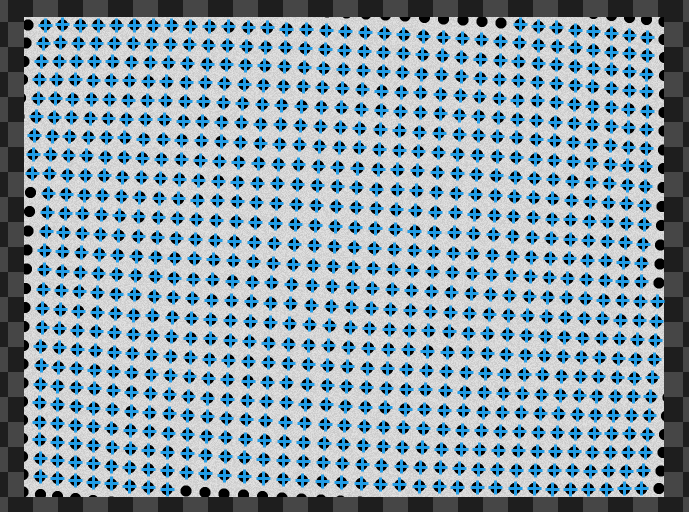
Detected calibration points
Remarks
The circle pattern must be a rectangular grid, with equal spacing in both dimensions.
Errors
List of possible exceptions:
| Error type | Description |
|---|---|
| DomainError | Not supported inImage pixel format. |
| DomainError | Region of interest exceeds an input image. |
| DomainError | Not supported inImage pixel format in DetectCalibrationGrid_Circles. Supported formats: UInt8. |
See Also
- DetectCalibrationGrid_Chessboard – Detects a chessboard calibration grid on the image, and returns calibration points where 4 chessboard squares meet.