Back to Aurora Vision Studio website
You are here: Start » Filter Reference » Geometry 2D » Geometry 2D Constructions » CreateCoordinateSystemFromPoint
 Basic
Basic| Module: | FoundationLite |
|---|
Creates a coordinate system with the specified origin.
Applications
Most often used to define an object alignment from results of 1D Edge Detection or Blob Analysis.
| Name | Type | Range | Description | |
|---|---|---|---|---|
 |
inPoint | Point2D | Origin of the created coordinate system | |
|
inAngle | Real | ||
|
inScale | Real | 0.001 -  |
|
|
inScaleDivisor | Real | 0.001 - |
|
 |
outCoordinateSystem | CoordinateSystem2D | ||
Hints
- Connect inPoint to a computed point, where you want to anchor a new coordinate system.
- Optionally set inAngle to define the rotation.
- Optionally set inScale and inScaleDivisor to obtain a custom scale.
Examples
Description of usage of this filter can be found in examples and tutorial: Blister Inspection (NET GmbH), Bottle Inspection, Cap (Easy), Washers, Cap (Advanced), Parallel Enumeration, Bottle Inspector Part 2: Measuring Liquid Level, Bottle Inspector Part 3: Foam Detection.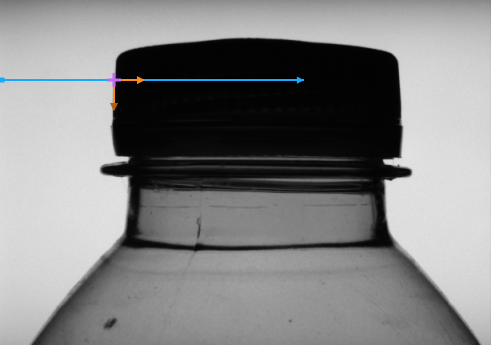
A local coordinate system created from a point. Here, the point is located with a 1D Edge Detection filter.
Remarks
Read more about Local Coordinate Systems in Machine Vision Guide: Local Coordinate Systems.
Complexity Level
This filter is available on Basic Complexity Level.
Filter Group
This filter is member of CreateCoordinateSystem filter group.