
You are here: Start » AVL.NET » Function Reference » Computer Vision » Template Matching » AVL.LocateSingleObject_NCC
AVL.LocateSingleObject_NCC
Finds a single occurrence of a predefined template on an image by analysing the normalized correlation between pixel values.
| Namespace: | AvlNet |
|---|---|
| Assembly: | AVL.NET.dll |
Syntax
public static void LocateSingleObject_NCC ( AvlNet.Image inImage, AvlNet.GrayModel inGrayModel, int inMinPyramidLevel, bool inIgnoreBoundaryObjects, float inMinScore, INullable<AvlNet.Object2D> outObject )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 | inImage | AvlNet.Image | Image on which object occurrence will be searched. | ||
| inGrayModel | AvlNet.GrayModel | Model of objects to be searched. | ||
| inMinPyramidLevel | int | <0, 12> | 0 | Defines the lowest pyramid level at which object position is still refined. Default value: 0. |
| inIgnoreBoundaryObjects | bool | False | Flag indicating whether objects crossing image boundary should be ignored or not. Default value: False. | |
| inMinScore | float | <-1.0f, 1.0f> | 0.7f | Minimum score of object candidates accepted at each pyramid level. Default value: 0.7f. |
 | outObject | AvlNet.INullable<AvlNet.Object2D> | Found object. This parameter cannot be null. |
Description
The operation matches the object model, inGrayModel, against the input image, inImage. The inSearchRegion region restricts the search area so that only in this region the centers of the objects can be presented. The inMinScore parameter determines the minimum score of the valid object occurrence.
The computation time of the filter depends on the size of the model, the sizes of inImage and inSearchRegion, but also on the value of inMinScore. This parameter is a score threshold. Based on its value some partial computation can be sufficient to reject some locations as valid object instances. Moreover, the pyramid of the images is used. Thus, only the highest pyramid level is searched exhaustively, and potential candidates are later validated at lower levels. The inMinPyramidLevel parameter determines the lowest pyramid level used to validate such candidates. Setting this parameter to a value greater than 0 may speed up the computation significantly, especially for higher resolution images. However, the accuracy of the found object occurrences can be reduced. Larger inMinScore generates less potential candidates on the highest level to verify on lower levels. It should be noted that some valid occurrences with score above this score threshold can be missed. On higher levels score can be slightly lower than on lower levels. Thus, some valid object occurrences which on the lowest level would be deemed to be valid object instances can be incorrectly missed on some higher level. The diagMatchPyramid output represents all potential candidates recognized on each pyramid level and can be helpful during the difficult process of the proper parameter setting.
To be able to locate objects which are partially outside the image, the filter assumes that there are only black pixels beyond the image border.
The outObject.Point contains the model reference point of the matched object occurrence. The outObject.Angle contains the rotation angle of the object. The outObject.Match provides information about both the position and the angle of the found match combined into value of Rectangle2D type. The outObject.Alignment contains information about the transform required for geometrical objects defined in the context of template image to be transformed into object in the context of outObject.Match position. This value can be later used e.g. by 1D Edge Detection or Shape Fitting categories filters.
Examples
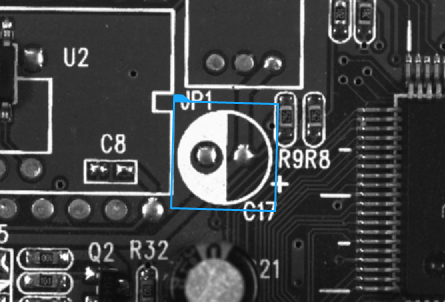
Locating single object with the gray-based method (inMaxPyramidLevel = 4).
Remarks
Read more about Local Coordinate Systems in Machine Vision Guide: Local Coordinate Systems.
Additional information about Template Matching can be found in Machine Vision Guide: Template Matching
Hardware Acceleration
This operation is optimized for SSE2 technology for pixels of type: UINT8.
This operation is optimized for AVX2 technology for pixels of type: UINT8.
This operation supports automatic parallelization for multicore and multiprocessor systems.
Hardware acceleration settings may be manipulated with Settings class.
Function Overrides
- LocateSingleObject_NCC(Image, NullableRef<ShapeRegion>, Nullable<CoordinateSystem2D>, GrayModel, Int32, Nullable<Int32>, Boolean, Single, Nullable<Single>, Nullable<Single>, INullable<Object2D>)
- LocateSingleObject_NCC(Image, NullableRef<ShapeRegion>, Nullable<CoordinateSystem2D>, GrayModel, Int32, Nullable<Int32>, Boolean, Single, Nullable<Single>, Nullable<Single>, INullable<Object2D>, NullableValue<Int32>, NullableRef<ShapeRegion>)
- LocateSingleObject_NCC(Image, NullableRef<ShapeRegion>, Nullable<CoordinateSystem2D>, GrayModel, Int32, Nullable<Int32>, Boolean, Single, Nullable<Single>, Nullable<Single>, INullable<Object2D>, Int32, ShapeRegion, IList<Image>, IList<Image>, INullable<List<Single>>)
- LocateSingleObject_NCC(Image, NullableRef<ShapeRegion>, Nullable<CoordinateSystem2D>, GrayModel, Int32, Nullable<Int32>, Boolean, Single, Nullable<Single>, Nullable<Single>, INullable<Object2D>, NullableValue<Int32>, NullableRef<ShapeRegion>, IList<Image>, IList<Image>, INullable<List<Single>>)