
You are here: Start » Function Reference » Shape Fitting » AvsFilter_FitSegmentToEdges
AvsFilter_FitSegmentToEdges
This is Filter Equivalent. This function may be present in generated code, but should not be used in hand-written code. CreateSegmentFittingMap and FitSegmentToEdges should be used instead.
Performs a series of 1D edge detections and finds a segment that best matches the detected points.
Syntax
void avs::AvsFilter_FitSegmentToEdges ( FitSegmentToEdgesState& ioState, const avl::Image& inImage, const avl::SegmentFittingField& inFittingField, atl::Optional<const avl::CoordinateSystem2D&> inFittingFieldAlignment, int inScanCount, int inScanWidth, const avl::InterpolationMethod::Type inImageInterpolation, const avl::EdgeScanParams& inEdgeScanParams, avl::Selection::Type inEdgeSelection, atl::Optional<const avl::LocalBlindness&> inLocalBlindness, float inMaxIncompleteness, atl::Optional<avl::MEstimator::Type> inOutlierSuppression, atl::Conditional<avl::Segment2D>& outSegment, atl::Optional<atl::Array<atl::Conditional<avl::Edge1D> >&> outEdges = atl::NIL, atl::Optional<atl::Conditional<avl::Profile>&> outDeviationProfile = atl::NIL, atl::Optional<avl::SegmentFittingField&> outAlignedFittingField = atl::NIL, atl::Array<avl::Segment2D>& diagScanSegments, atl::Array<avl::Rectangle2D>& diagSamplingAreas, atl::Array<avl::Profile>& diagBrightnessProfiles, atl::Array<avl::Profile>& diagResponseProfiles )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
| ioState | FitSegmentToEdgesState& | Object used to maintain state of the function. | |||
 |
inImage | const Image& | Image to fit segment to | ||
|
inFittingField | const SegmentFittingField& | Segment fitting field | ||
|
inFittingFieldAlignment | Optional<const CoordinateSystem2D&> | NIL | Adjusts the fitting field to the position of the inspected object | |
|
inScanCount | int | 3 -  |
10 | The number of points that will be searched to estimate the position of the segment |
|
inScanWidth | int | 1 - |
5 | The width of each scan field (in pixels) |
|
inImageInterpolation | const InterpolationMethod::Type | Bilinear | Interpolation method used for extraction of image pixel values | |
|
inEdgeScanParams | const EdgeScanParams& | EdgeScanParams ( ProfileInterpolation: Quadratic4 SmoothingStdDev: 1.0f MinMagnitude: 5.0f EdgeTransition: BrightToDark ) | Parameters controlling the edge extraction process | |
|
inEdgeSelection | Selection::Type | Selection mode of edges | ||
|
inLocalBlindness | Optional<const LocalBlindness&> | NIL | Defines conditions in which weaker edges can be detected in the vicinity of stronger edges | |
|
inMaxIncompleteness | float | 0.0 - 0.999 | 0.1f | Maximal fraction of edge points not found |
|
inOutlierSuppression | Optional<MEstimator::Type> | NIL | Selects a method for ignoring incorrectly detected points | |
 |
outSegment | Conditional<Segment2D>& | Fitted segment or nothing if the fitting fails | ||
|
outEdges | Optional<Array<Conditional<Edge1D> >&> | NIL | Found edges | |
|
outDeviationProfile | Optional<Conditional<Profile>&> | NIL | Profile of distances between the actual segment points and the corresponding reference segment points | |
|
outAlignedFittingField | Optional<SegmentFittingField&> | NIL | Fitting field used; in the image coordinate system | |
 |
diagScanSegments | Array<Segment2D>& | Segments along which the scans were run | ||
|
diagSamplingAreas | Array<Rectangle2D>& | Areas from which the input image is sampled | ||
|
diagBrightnessProfiles | Array<Profile>& | Extracted image profiles | ||
|
diagResponseProfiles | Array<Profile>& | Profiles of the edge (derivative) operator response |
Description
The operation tries to fit a given segment to edges present in the inImage image. Internally, it performs a series of scans with the ScanSingleEdge filter along inScanCount specific scan segments which length is always equal to the inFittingField width. The found points are then used to determine the actual position of the segment in the image. Only inMaxIncompleteness fraction of these scans may fail. If the fitting according to the given parameters is not possible, outSegment is set to Nil.
Hints
- Connect an input image to the inImage input.
- Define inEdgeScanParams.EdgeTransition to detect a particular edge type, and only that type.
- If no or too few edge points are found, try decreasing inEdgeScanParams.MinMagnitude.
- If some of the scans may fail, set the inMaxIncompleteness input accordingly.
- If some of the scans may produce false results, try different values of the inOutlierSuppression input.
- Use the outEdges outputs to visualize the scanning results.
Examples
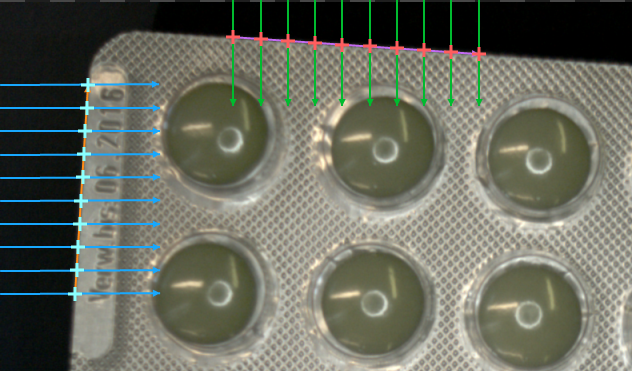
Fitting two segments to the edges of a blister
(inEdgeScanParams.EdgeTransition = DarkToBright, inEdgeScanParams.SmoothingStdDev = 1.0).
Remarks
For more information about local coordinate systems please refer to the following article.
This filter is a part of the Shape Fitting toolset. To read more about this technique, one can refer to the Shape Fitting chapter of our Machine Vision Guide
Hardware Acceleration
This operation supports automatic parallelization for multicore and multiprocessor systems.