
You are here: Start » Function Reference » Shape Features » ShapeConvexity
ShapeConvexity
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
Computes the area of a shape divided by the area of its convex hull.
Syntax
void avl::ShapeConvexity ( const avl::Path& inShape, float& outConvexity )
Parameters
| Name | Type | Default | Description | |
|---|---|---|---|---|
 |
inShape | const Path& | ||
 |
outConvexity | float& |
Description
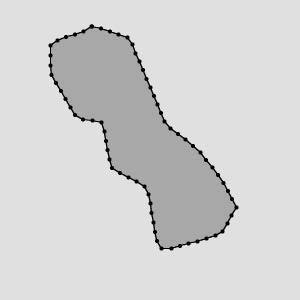
Convexity is a measure of how close a shape is to being convex. Convex shapes have convexity equal to 1.0, while the more concave the shape is, the closer to 0.0 is its convexity.
Mathematically, the convexity is calculated as follows: 
Note that if the input path is not a valid shape (i.e. it has at least one self-intersection), the computation may lead to results that are not intuitive.
Examples
 |
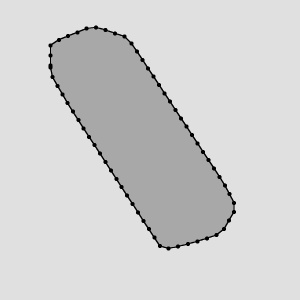 |
Area of the sample shape (on the left) equals to 17529.730, while area of its convex hull (on the right) equals to 20176.250, so the convexity of the shape equals to 17529.730/20176.250 = 0.867.
Errors
List of possible exceptions:
| Error type | Description |
|---|---|
| DomainError | Degenerate shape on input in ShapeConvexity. |
| DomainError | Open path on input in ShapeConvexity. |
See Also
- RegionConvexity – Computes the area of a region divided by area of its convex hull.
- PathConvexHull – Computes the smallest convex shape that contains the given path.
- ShapeElongation – Computes the elongation factor of a shape (perfect circle has minimal elongation equal 1.0).
- ShapeCircularity – Computes the area of a shape divided by the area of a circle having the same feature.