
Back to Adaptive Vision Library website

You are here: Start » Function Reference » Region Features » RegionConvexity
RegionConvexity
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
Computes the area of a region divided by area of its convex hull.
Syntax
C++
C#
void avl::RegionConvexity ( const avl::Region& inRegion, float& outConvexity )
Parameters
| Name | Type | Default | Description | |
|---|---|---|---|---|
 |
inRegion | const Region& | Input region | |
 |
outConvexity | float& |
Description
Convexity is a measure of how close a region is to being convex. Convex regions have convexity equal to 1.0, while the more concave the region is, the closer to 0.0 is its convexity.
Mathematically, the convexity is calculated as follows: 
Hints
- If the input region is not guaranteed to be non-empty, precede this filter with SkipEmptyRegion.
Examples
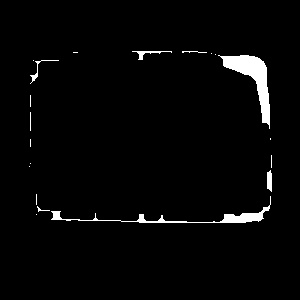 |
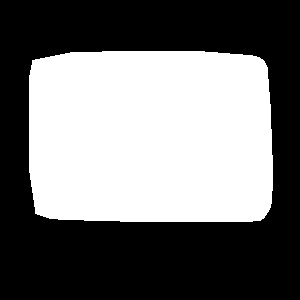 |
Area of the sample region (on the left) equals to 2345, while area of its convex hull (on the right) equals to 40357, so the RegionConvexity run on the sample region would produce the result 2345/40357 = 0.058 .
Errors
List of possible exceptions:
| Error type | Description |
|---|---|
| DomainError | Empty region on input in RegionConvexity. |
See Also
- RegionConvexHull – Computes the smallest convex region containing the input region.
- ShapeConvexity – Computes the area of a shape divided by the area of its convex hull.