
Back to Adaptive Vision Library website

You are here: Start » Function Reference » Image Segmentation » ImageWatersheds
ImageWatersheds
Computes dark basins which are separated by at least inThreshold height watershed.
| Header: | AVL.h |
|---|
Syntax
C++
C#
void avl::ImageWatersheds ( const avl::Image& inImage, const int inThreshold, atl::Array<avl::Region>& outBasins )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 |
inImage | const Image& | Input image | ||
|
inThreshold | const int | 0 - + |
10 | Input minimum separating watershed height |
 |
outBasins | Array<Region>& | Output dark basins found |
Description
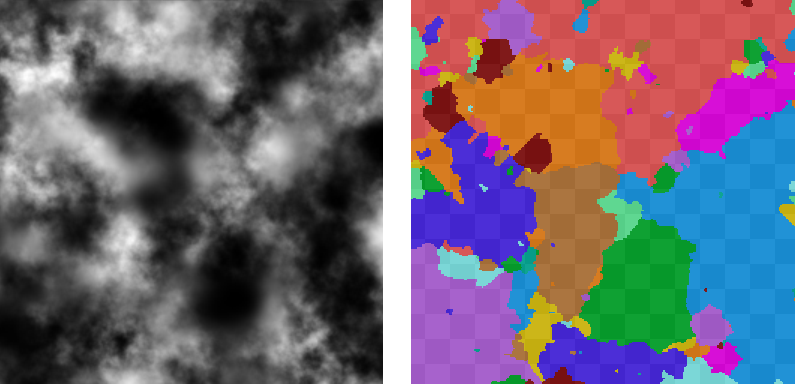
Image is interpreted as a topographic map, where dark pixels represents valleys. Each step of iteration increase level of water in valleys, until basins are adjacent. Each basin is represented by another region in a result array.
Examples
ImageWatersheds performed on the sample image.
See Also
- SegmentImage_Edges – Segments an image into blobs using image edges as their borders.
- SegmentImage_Gray – Segments an image into blobs examining differences between neighbouring pixels values.