
Back to Adaptive Vision Library website

You are here: Start » Function Reference » Hough Transform » DetectSingleCircle
DetectSingleCircle
Finds the strongest circle of a given radius in the input image.
| Header: | AVL.h |
|---|
Syntax
C++
C#
void avl::DetectSingleCircle ( const avl::Image& inImage, atl::Optional<const avl::Region&> inRoi, float inRadius, float inMinScore, float inEdgeThreshold, atl::Conditional<avl::HoughCircle>& outCircle, avl::Image& diagGradientMagnitudeImage, avl::Image& diagScoreImage )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 |
inImage | const Image& | Input image | ||
|
inRoi | Optional<const Region&> | NIL | Input region of interest | |
|
inRadius | float | 0.0 -  |
10.0f | Circle's radius |
|
inMinScore | float | 0.0 - |
20.0f | Minimum matching score |
|
inEdgeThreshold | float | 10.0f | Minimum accepted edge magnitude | |
 |
outCircle | Conditional<HoughCircle>& | Found circle | ||
 |
diagGradientMagnitudeImage | Image& | Visualized gradients magnitude of an input image | ||
|
diagScoreImage | Image& | Calculated score for each pixel of an input image |
Description
The operation detects circular object of given radius (in pixels) in the inImage using the Hough Transform approach.
Hints
- Pass an input image to the inImage input.
- Define the expected circle radius on the inRadius input.
- Set inEdgeThreshold to define the minimum strength of edges that will be taken into account. Verify this value with the diagGradientMagnitudeImage output.
- Experimentally set the inMinScore value, whose meaning is more or less "the number of pixels voting for a particular object location".
Examples
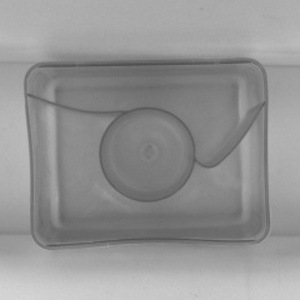 |
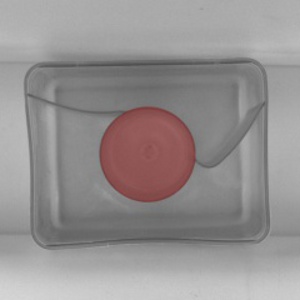 |
DetectSingleCircle performed on the sample image.
Hardware Acceleration
This operation supports automatic parallelization for multicore and multiprocessor systems.
See Also
- DetectLines – Finds lines in an image.
- DetectMultipleCircles – Finds circles of a given radius in the input image.
- DetectPaths – Finds paths in an image.
- DetectSegments – Finds segments in an image.