
Back to Adaptive Vision Library website

You are here: Start » Function Reference » Geometry 2D Angle Metrics » AngleBetweenDirections
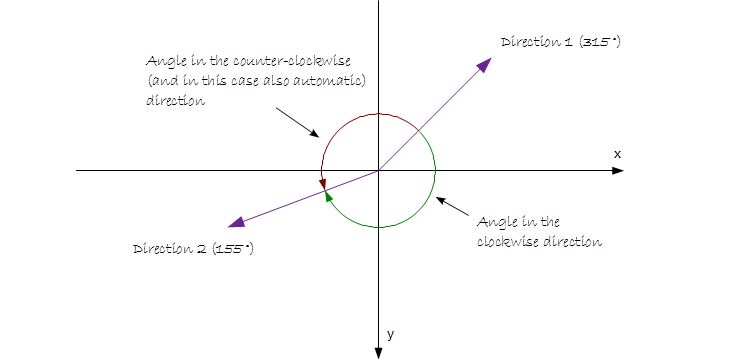
AngleBetweenDirections
Measures the rotation angle from first to second direction.
| Header: | AVL.h |
|---|
Syntax
C++
C#
void avl::AngleBetweenDirections ( float inDirection1, float inDirection2, atl::Optional<avl::RotationDirection::Type> inRotationDirection, avl::AngleRange::Type inAngleRange, atl::Optional<float&> outAbsoluteAngle = atl::NIL, atl::Optional<float&> outDirectedAngle = atl::NIL )
Parameters
| Name | Type | Default | Description | |
|---|---|---|---|---|
 |
inDirection1 | float | Start direction | |
|
inDirection2 | float | Target direction | |
|
inRotationDirection | Optional<RotationDirection::Type> | NIL | Clockwise, counter-clockwise or automatic (by smaller angle) |
|
inAngleRange | AngleRange::Type | Switches between ranges <0; 180) and <0; 360) | |
 |
outAbsoluteAngle | Optional<float&> | NIL | Angle value used for measurements <0; 360> |
|
outDirectedAngle | Optional<float&> | NIL | Angle value used for clockwise transformations <-360; 360> |
Description
Direction is a number in the range of <0, 180) or <0, 360). This is controlled with the inAngleRange input. The angle is computed from first to second direction clockwise or counter-clockwise. If the rotation direction is not specified, chosen is the one that produces smaller absolute angle.
Examples
See Also
- AngleBetweenLines – Measures the smaller and the larger angle between two lines.
- AngleBetweenSegments – Measures the angle between two segments with one of four possible metrics.
- AngleBetweenVectors – Measures the angle between two vectors.