
You are here: Start » Function Reference » 1D Edge Detection » ScanExactlyNRidges

ScanExactlyNRidges
Locates a specified number of the strongest dark or bright pixel peak along a given path.
| Header: | AVL.h |
|---|
Syntax
void avl::ScanExactlyNRidges ( const avl::Image& inImage, const ScanMap& inScanMap, const RidgeScanParams& inRidgeScanParams, int inRidgeCount, avl::Selection::Type inRidgeSelection, float inMinDistance, atl::Optional<float> inMaxDistance, atl::Optional<const avl::LocalBlindness&> inLocalBlindness, atl::Conditional<atl::Array<avl::Ridge1D> >& outRidges, atl::Conditional<atl::Array<avl::Gap1D> >& outGaps, avl::Profile& diagBrightnessProfile, avl::Profile& diagResponseProfile )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 |
inImage | const Image& | Input image | ||
|
inScanMap | const ScanMap& | Data precomputed with CreateScanMap | ||
|
inRidgeScanParams | const RidgeScanParams& | Parameters controlling the ridge extraction process | ||
|
inRidgeCount | int | 0 -  |
1 | Number of ridges to be found |
|
inRidgeSelection | Selection::Type | Selection::Best | Selection mode of the resulting ridges | |
|
inMinDistance | float | 0.0 - |
0.0f | Minimal distance between consecutive ridges |
|
inMaxDistance | Optional<float> | 0.0 - |
NIL | Maximal distance between consecutive ridges |
|
inLocalBlindness | Optional<const LocalBlindness&> | NIL | Defines conditions in which weaker ridges can be detected in the vicinity of stronger ridges | |
 |
outRidges | Conditional<Array<Ridge1D> >& | Found ridges | ||
|
outGaps | Conditional<Array<Gap1D> >& | Gaps between consecutive edges | ||
 |
diagBrightnessProfile | Profile& | Extracted image profile | ||
|
diagResponseProfile | Profile& | Profile of the ridge operator response |
Description
The operation scans the image using inScanMap previously generated from a scan path and finds a set of inRidgeCount image ridges perpendicular to the path. If no subset (of inRidgeCount elements) of detected ridges meets the requirements of inRidgeScanParams.minMagnitude, inMinDistance, inRidgeScanParams.ridgePolarity then the outputs are set to NIL.
Note that in case of a scan path which is closed, the parameters controlling the distances between consecutive found objects do not control the distance between the first and the last of the found objects (counting from the beginning of the scan path).
Hints
- Set inRidgeCount to the number of ridges that are to be found (the N number).
- Define inEdgeScanParams.RidgePolarity to detect a particular ridge type, and only that type.
- If the expected number of ridges cannot be found, try decreasing inRidgeScanParams.MinMagnitude. Verify this with the values on the diagResponseProfile output.
- If consecutive ridges are very close to each other, change inEdgeScanParams.ProfileInterpolation to Quadratic3.
- Adjust inMinDistance (in pixels) to filter out false ridges that appear in proximity to other ridges.
Examples
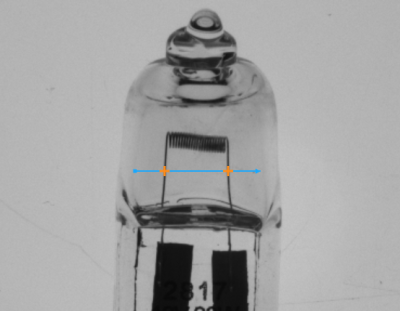
ScanMultipleRidges locates the ridges using a scan map representing the scan path above.
Remarks
For more information about local coordinate systems please refer to the following article.
This filter is a part of the 1D Edge Detection toolset. For a comprehensive introduction to this technique please refer to 1D Edge Detection and 1D Edge Detection - Subpixel Precision chapters of our Machine Vision Guide.
See Also
- CreateScanMap – Precomputes a data object that is required for fast 1D edge detection.
- ScanExactlyNRidges – Locates a specified number of the strongest dark or bright pixel peak along a given path.
- ScanSingleRidge – Locates the strongest dark or bright pixel peak along a given path.