
You are here: Start » Function Reference » Path » Path Metrics » PathToPointDistanceProfile
PathToPointDistanceProfile
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
| Module: | FoundationBasic |
Computes the profile of distances between the specified point and the characteristic points of a path.
Syntax
void avl::PathToPointDistanceProfile ( const avl::Point2D& inPoint, const avl::Path& inPath, float inResolution, avl::Profile& outDistanceProfile, atl::Optional<atl::Array<float>&> outDistances = atl::NIL, atl::Optional<atl::Array<avl::Segment2D>&> outConnectingSegments = atl::NIL )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 |
inPoint | const Point2D& | Input point | ||
|
inPath | const Path& | Input path | ||
|
inResolution | float | 0.0 -  |
1.0f | |
 |
outDistanceProfile | Profile& | Profile of distances between input point and consecutive points of input path | ||
|
outDistances | Optional<Array<float>&> | NIL | Distances between input point and consecutive points of input path | |
|
outConnectingSegments | Optional<Array<Segment2D>&> | NIL | Segments connecting input point and consecutive points of input path |
Optional Outputs
The computation of following outputs can be switched off by passing value atl::NIL to these parameters: outDistances, outConnectingSegments.
Read more about Optional Outputs.
Description
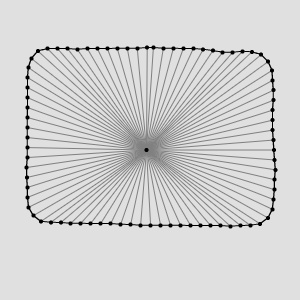
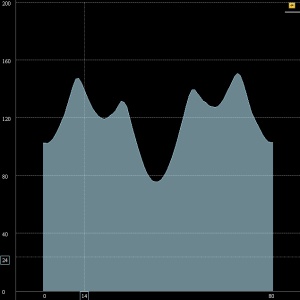
The operation iterates over characteristic points of inPath and at each point computes the distance from this point to inPoint. The operation computes outDistanceProfile profile of consecutive distances and, additionally, the outConnectingSegments array of corresponding line segments.
Examples
 |
 |
The resulting outConnectingSegments drawn onto the input data. |
The resulting outDistanceProfile. |
See Also
- PathToPointDistance – Computes the smallest distance between a path and a point.