
Back to Adaptive Vision Library website

You are here: Start » Function Reference » Computer Vision » Camera Calibration » DetectCalibrationGrid_Chessboard
DetectCalibrationGrid_Chessboard
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
| Module: | Calibration |
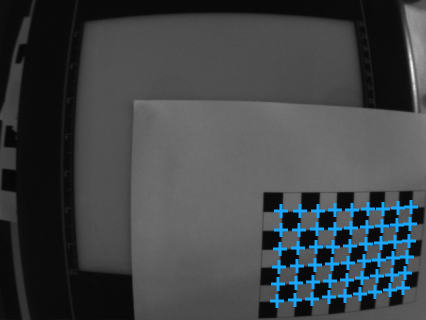
Detects a chessboard calibration grid on the image, and returns calibration points where 4 chessboard squares meet.
Applications: Camera calibration, image to world coordinates transformations.
Syntax
C++
C#
void avl::DetectCalibrationGrid_Chessboard ( const avl::Image& inImage, atl::Optional<const avl::Region&> inRoi, const avl::Size& inBoardSize, bool inFastApproximate, atl::Array<avl::AnnotatedPoint2D>& outImageGrid )
Parameters
| Name | Type | Default | Description | |
|---|---|---|---|---|
 |
inImage | const Image& | Input image | |
|
inRoi | Optional<const Region&> | NIL | Range of pixels to be processed |
|
inBoardSize | const Size& | (Width: 0, Height: 0) | Number of checkerboard squares in X and Y dimensions. |
|
inFastApproximate | bool | False | Fast filter execution, but result is approximate. |
 |
outImageGrid | Array<AnnotatedPoint2D>& | Detected grid |
Hints
Make sure that the whole calibration grid is visible in the image. Otherwise, it will not be detected because the detection algorithm requires a few pixels wide quiet zone around the chessboard. Pay attention to the number of columns and rows, as providing misleading data may make the algorithm work incorrectly or not work at all.
Examples
DetectCalibrationGrid_Chessboard executed with inBoardSize = {10,7}
Errors
List of possible exceptions:
| Error type | Description |
|---|---|
| DomainError | Input image is too small |
| DomainError | Input image must have pixels of UInt8 type |
| DomainError | Region of interest exceeds an input image. |
| DomainError | Specified board is too small, minimum size is 4x4 |
See Also
- DetectCalibrationGrid_Circles – Detects an arbitrary size symmetric circle pattern on the image.