
Back to Adaptive Vision Library website

You are here: Start » Function Reference » Camera Calibration » DetectChessboardGrid
DetectChessboardGrid
Detects a chessboard on the image, and returns the points where 4 chessboard squares meet.
Syntax
C++
C#
void avl::DetectChessboardGrid ( const avl::Image& inImage, int inChessboardWidth, int inChessboardHeight, const avl::Point3D& inGridOrigin, float inSquareDimension, bool inAdaptiveThresholding, bool inImageNormalization, bool inAdditionalFiltering, bool inPresenceCheck, bool inSubpixelRefinement, atl::Conditional<atl::Array<avl::Point2D> >& outImageGridPoints, atl::Conditional<atl::Array<avl::Point3D> >& outWorldGridPoints )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 |
inImage | const Image& | Input image | ||
|
inChessboardWidth | int | 4 -  |
Number of ranks (columns) of the chessboard | |
|
inChessboardHeight | int | 4 - |
Number of files (rows) of the chessboard | |
|
inGridOrigin | const Point3D& | Real-world coordinates of top-left grid point | ||
|
inSquareDimension | float | 0.0 - |
1.0f | Real-world length of a single chessboard square (mm) |
|
inAdaptiveThresholding | bool | Use adaptive thresholding instead of a global threshold of average | ||
|
inImageNormalization | bool | Normalize input image using histogram equalization prior to detection | ||
|
inAdditionalFiltering | bool | Use more criteria for eliminating false chessboards | ||
|
inPresenceCheck | bool | Perform a fast approximate test of chessboard presence before locating it | ||
|
inSubpixelRefinement | bool | If corners are found, post-process them to improve precision | ||
 |
outImageGridPoints | Conditional<Array<Point2D> >& | |||
|
outWorldGridPoints | Conditional<Array<Point3D> >& | Corresponding 3D (World) points, generated from grid origin and square dimension |
Examples
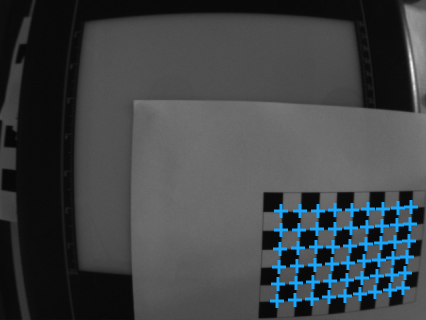
DetectChessboardGrid executed with inChessboardWidth = 10, inChessboardHeight = 7.
Errors
| Error type | Description |
|---|---|
| DomainError | Empty inImage in DetectChessboardGrid. |
| DomainError | Error in DetectChessboardGrid:Error message |
| DomainError | Error in DetectChessboardGrid: Error message |