

You are here: Start » AVL.NET » AVL.PathTurnAngleMaximum(AvlNet.Path, AvlNet.TurnAngleDirection, AvlNet.TurnAnglePrecision, float, AvlNet.Point2D, float)
AVL.PathTurnAngleMaximum(AvlNet.Path, AvlNet.TurnAngleDirection, AvlNet.TurnAnglePrecision, float, AvlNet.Point2D, float)
Finds the maximum of the profile of turn angles of a path.
| Namespace: | AvlNet |
|---|---|
| Assembly: | AVL.NET.dll |
Syntax
public static void PathTurnAngleMaximum( AvlNet.Path inPath, AvlNet.TurnAngleDirection inAllowedTurnDirection, AvlNet.TurnAnglePrecision inResultPrecision, out float outMaximumTurnAngleIndex, out AvlNet.Point2D outMaximumTurnAnglePoint, out float outMaximumTurnAngleAngle )
Parameters
- inPath
- Type: AvlNet.Path
Input path - inAllowedTurnDirection
- Type: AvlNet.TurnAngleDirection
Allows to detect only left-turns, only right-turns or both - inResultPrecision
- Type: AvlNet.TurnAnglePrecision
Switches between pixel-precise or subpixel-precise detection of the found maximum - outMaximumTurnAngleIndex
- Type: System.Single
Index of found maximum - outMaximumTurnAnglePoint
- Type: AvlNet.Point2D
Found point of a path with maximum turn angle - outMaximumTurnAngleAngle
- Type: System.Single
Maximal turn angle of the input path
Description
The operation computes the profile of turn angles of a path and finds the maximum of the profile. The inAllowedTurnDirection parameter restricts kind of turns taken into consideration (left-turns only, right-turns only or both), while inResultPrecision determines the precision of the resulting maximum point.
Examples
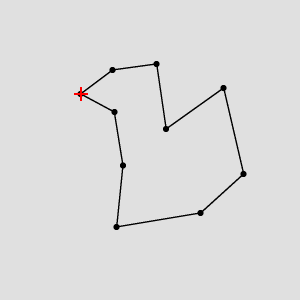 |
PathTurnAngleMaximum run on the sample path with inAllowedTurnDirection = Right
Errors
| Error type | Description |
|---|---|
| DomainError | Path with no turn angle on input in PathTurnAngleMaximum. |