

You are here: Start » AVL.NET » AVL.FitPathToRidges(AvlNet.Image, AvlNet.PathFittingMap, AvlNet.RidgeScanParams, AvlNet.Selection, AvlNet.LocalBlindness, int?, float?, float, AvlNet.Path, AvlNet.Ridge1D?[], AvlNet.Profile, AvlNet.Profile[], AvlNet.Profile[])
AVL.FitPathToRidges(AvlNet.Image, AvlNet.PathFittingMap, AvlNet.RidgeScanParams, AvlNet.Selection, AvlNet.LocalBlindness, int?, float?, float, AvlNet.Path, AvlNet.Ridge1D?[], AvlNet.Profile, AvlNet.Profile[], AvlNet.Profile[])
| Namespace: | AvlNet |
|---|---|
| Assembly: | AVL.NET.dll |
Syntax
public static void FitPathToRidges( AvlNet.Image inImage, AvlNet.PathFittingMap inFittingMap, AvlNet.RidgeScanParams inRidgeScanParams, AvlNet.Selection inRidgeSelection, AvlNet.LocalBlindness inLocalBlindness, int? inMaxInterpolationLength, float? inMaxDeviationDelta, float inMaxIncompleteness, out AvlNet.Path outPath, out AvlNet.Ridge1D?[] outRidges, out AvlNet.Profile outDeviationProfile, out AvlNet.Profile[] diagBrightnessProfiles, out AvlNet.Profile[] diagResponseProfiles )
Parameters
- inImage
- Type: AvlNet.Image
- inFittingMap
- Type: AvlNet.PathFittingMap
- inRidgeScanParams
- Type: AvlNet.RidgeScanParams
- inRidgeSelection
- Type: AvlNet.Selection
- inLocalBlindness
- Type: AvlNet.LocalBlindness
- inMaxInterpolationLength
- Type: System.Nullable<System.Int32>
- inMaxDeviationDelta
- Type: System.Nullable<System.Single>
- inMaxIncompleteness
- Type: System.Single
- outPath
- Type: AvlNet.Path
- outRidges
- Type: System.Nullable<AvlNet.Ridge1D>
- outDeviationProfile
- Type: AvlNet.Profile
- diagBrightnessProfiles
- Type: AvlNet.Profile
- diagResponseProfiles
- Type: AvlNet.Profile
Description
The operation tries to fit a given path to ridges present in the inImage image. Internally, it performs a series of scans with the ScanSingleRidge filter using inFittingMap previously generated from the object being fitted. The found points are then used to determine the actual position of the path in the image. Only inMaxIncompleteness fraction of these scans may fail. If the fitting according to the given parameters is not possible, outPath is set to Nil.
There are also another parameters that control the path fitting process. The inMaxDeviationDelta parameter defines the maximal allowed difference between deviations of consecutive points from the input path points. If some of the scans fail or if some of found points are classified to be wrong according to another control parameters, output path points corresponding to them are interpolated depending on points in their nearest vicinity. No more than inMaxInterpolationLength consecutive points can be interpolated. The exception to this behavior are points which were not found on both ends of the input path. Those are not part of the result at all.
Examples
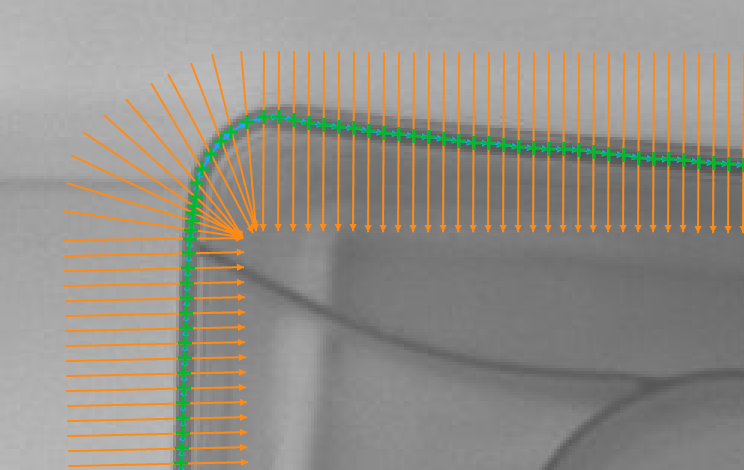
Fitting a path to the walls of a plastic capsule
(inRidgeScanParams.RidgePolarity = Dark, inRidgeScanParams.RidgeWidth = 6, inRidgeScanParams.RidgeOperator = ArithmeticMean).
Remarks
For more information about local coordinate systems please refer to the following article.
This filter is a part of the Shape Fitting toolset. To read more about this technique, one can refer to the Shape Fitting chapter of our Machine Vision Guide
Hardware Acceleration
This operation supports automatic parallelization for multicore and multiprocessor systems.
Hardware acceleration settings may be manipulated with Settings class.