

You are here: Start » AVL.NET » AVL.PathTurnAngleLocalMaxima(AvlNet.Path, AvlNet.TurnAngleDirection, AvlNet.TurnAnglePrecision, float, float, float, float[], AvlNet.Point2D[], float[], AvlNet.Path, AvlNet.Profile)
AVL.PathTurnAngleLocalMaxima(AvlNet.Path, AvlNet.TurnAngleDirection, AvlNet.TurnAnglePrecision, float, float, float, float[], AvlNet.Point2D[], float[], AvlNet.Path, AvlNet.Profile)
Finds the local maxima of the profile of turn angles of a path.
| Namespace: | AvlNet |
|---|---|
| Assembly: | AVL.NET.dll |
Syntax
public static void PathTurnAngleLocalMaxima( AvlNet.Path inPath, AvlNet.TurnAngleDirection inAllowedTurnDirection, AvlNet.TurnAnglePrecision inResultPrecision, float inMinTurnAngle, float inMinDistance, float inSmoothingStdDev, out float[] outTurnAngleMaximaIndices, out AvlNet.Point2D[] outTurnAngleMaximaPoints, out float[] outTurnAngleMaximaAngles, out AvlNet.Path diagSmoothedPath, out AvlNet.Profile diagTurnAngleProfile )
Parameters
- inPath
- Type: AvlNet.Path
Input path - inAllowedTurnDirection
- Type: AvlNet.TurnAngleDirection
Allows to detect only left-turns, only right-turns or both - inResultPrecision
- Type: AvlNet.TurnAnglePrecision
Switches between pixel-precise or subpixel-precise detection of the found maxima - inMinTurnAngle
- Type: System.Single
Minimal value of a relevant angle - inMinDistance
- Type: System.Single
Minimal distance on the path between two local maxima assuming each path segment has unit length - inSmoothingStdDev
- Type: System.Single
Standard deviation of the gaussian smoothing applied to the input path - outTurnAngleMaximaIndices
- Type: System.Single
Indices of found local maxima - outTurnAngleMaximaPoints
- Type: AvlNet.Point2D
Found local maxima of turn angle profile of the smoothed input path - outTurnAngleMaximaAngles
- Type: System.Single
Turn angles of found local maxima - diagSmoothedPath
- Type: AvlNet.Path
Input path smoothed with gaussian kernel - diagTurnAngleProfile
- Type: AvlNet.Profile
Profile of turn angles at characteristic points of the smoothed input path
Description
The operation computes the profile of turn angles of a path and finds the local maxima of the profile having value at least inMinTurnAngle. The inAllowedTurnDirection parameter restricts kind of turns taken into consideration (left-turns only, right-turns only or both), while inResultPrecision determines the precision of the resulting maxima points. Found maxima have to be at least inMinDistance from each other (the distance is measured along the input path assuming each path segment has unit length).
Examples
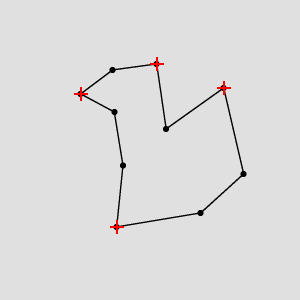 |
PathTurnAngleLocalMaxima run on the sample path with inAllowedTurnDirection = Right