
You are here: Start » Filter Reference » Path Global Transforms » SegmentPath
SegmentPath

Splits a path into parts that can be approximated as segments or arcs.
| Name | Type | Range | Description | |
|---|---|---|---|---|
 |
inPath | Path | Path to be segmented | |
|
inSmoothingStdDev | Real | 0.0 -  |
Standard deviation used for initial gaussian smoothing of the segmented path |
|
inMaxDeviation | Real | 0.0 - |
Maximal distance between any point of a classified segment to the abstract shape |
|
inSegmentationMode | PathSegmentationMode | Whether to use arcs for segmentation | |
|
inMaxArcRadius | Real* | 0.0 - |
Maximal radius of an arc fitted to segment |
 |
outStraight | PathArray | Parts classified as straight segments | |
|
outArciform | PathArray | Parts classified as arciform segments | |
|
outSegments | Segment2DArray | Segments corresponding to sections of path from outStraight | |
|
outArcs | Arc2DArray | Arcs corresponding to sections of path from outArciform | |
Applications
Description
The operation segments the inPath into parts of preferably simple shape. Each of the resulting parts is classified as one of the following:
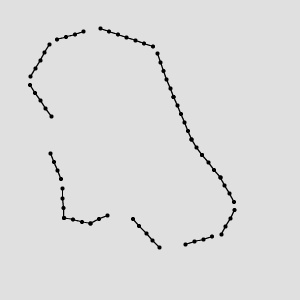
- Straight section - in which case it is returned in outStraight output array
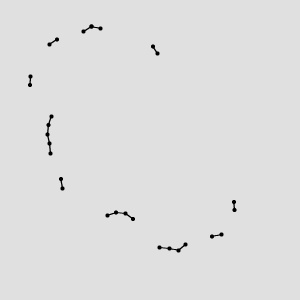
- Arciform section - in which case it is returned in outArciform output array
The operation guarantees that the maximal distance from any of the resulting path section to the corresponding abstract shape (line segment or circular arc) is less than inMaxDeviation.
Examples
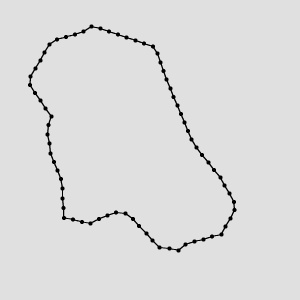 |
 |
 |
The resulting outStraight array (some of the paths in the picture have common ends but in fact each straight part is a separate path). |
The resulting outArciform array. |
Errors
This filter can throw an exception to report error. Read how to deal with errors in Error Handling.
List of possible exceptions:
| Error type | Description |
|---|---|
| DomainError | Empty path on input in SegmentPath. |
Complexity Level
This filter is available on Basic Complexity Level.
See Also
- JoinAdjacentPaths – Joins those paths of an array which endpoints lie near enough.