
You are here: Start » Function Reference » Template Matching » MergeLocationResults_Single
MergeLocationResults_Single
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
Combines results from multiple LocateSingleObject instances.
Syntax
void avl::MergeLocationResults_Single ( const atl::Conditional<avl::Object2D>& inObject1, const atl::Conditional<avl::Object2D>& inObject2, const atl::Conditional<avl::Object2D>& inObject3, const atl::Conditional<avl::Object2D>& inObject4, float inMinScore, atl::Conditional<avl::Object2D>& outObject, atl::Conditional<int>& outIndex )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 |
inObject1 | const Conditional<Object2D>& | |||
|
inObject2 | const Conditional<Object2D>& | |||
|
inObject3 | const Conditional<Object2D>& | |||
|
inObject4 | const Conditional<Object2D>& | |||
|
inMinScore | float | -1.0 - 1.0 | 0.0f | |
 |
outObject | Conditional<Object2D>& | |||
|
outIndex | Conditional<int>& |
In-place Processing
This function supports in-place data processing - you can pass the same reference to inObject1 and outObject, inObject2 and outObject, inObject3 and outObject, inObject4 and outObject
Read more about In-place Computation.
Description
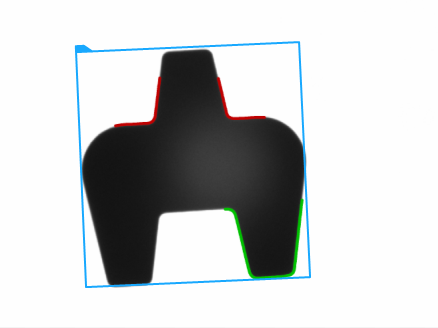
Filter selects the best matching object from the given matching objects.
This filter is especially useful for finding big objects by using smaller template models instead of the large model.
This filter will return a valid object location even if object is partially covered.
Examples
 |
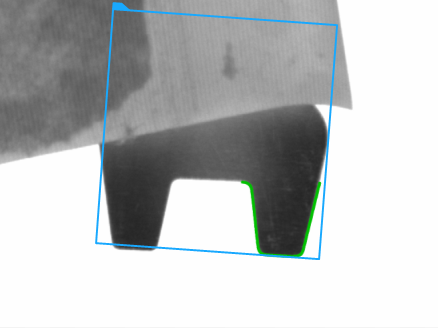 |
Object location found based on two matching objects(red and green).
Remarks
Each template matching object which is used in filter must have set this same reference frame.
See Also
- LocateMultipleObjects_Edges – Finds all occurrences of a predefined template on an image by comparing object edges.
- LocateSingleObject_Edges – Finds a single occurrence of a predefined template on an image by comparing object edges.