
Back to Adaptive Vision Studio website

You are here: Start » Filter Reference » Camera Calibration » DetectCalibrationGrid_Circles
DetectCalibrationGrid_Circles
Detects an arbitrary size symmetric circle pattern on the image.
| Name | Type | Range | Description | |
|---|---|---|---|---|
 |
inImage | Image | Input image | |
|
inCircleRadius | Real | 1.0 -  |
Circle radius measured in input image pixels. |
|
inWorldCircleSpacing | Real | 0.0 - |
Real-world distance between adjacent circles centers. |
|
inCircleDetectionMinScore | Real | 0.0 - |
Minimum matching score for circle detector. |
|
inMaxCircleSpacing | Real* | 1.0 - |
Maximum distance between adjacent circle centers in the image measured in pixels. Defaults to 8*inCircleRadius. |
 |
outImagePoints | Point2DArray | Image coordinates of detected calibration points. | |
|
outWorldPlanePoints | Point2DArray | World plane coordinates of detected calibration points. | |
 |
diagCircleCandidates | Circle2DArray | Detected circles, before the grid construction step | |
Applications
Camera calibration, image to world coordinates transformations.
Hints
In a case of sparse circle pattern (i.e. distances between circles relatively large in comparison to their radius), output point arrays may be empty despite properly detected diagCircleCandidates.
In such a case it may be needed to set the inMaxCircleSpacing.
Examples
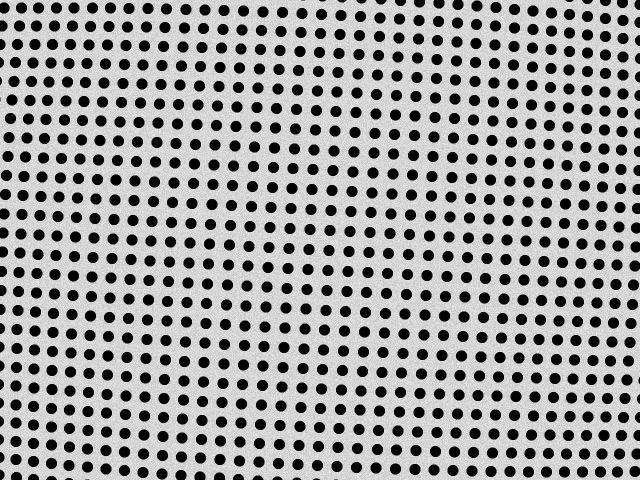
Input image for DetectCalibrationGrid_Circles executed with inCircleRadius = 5
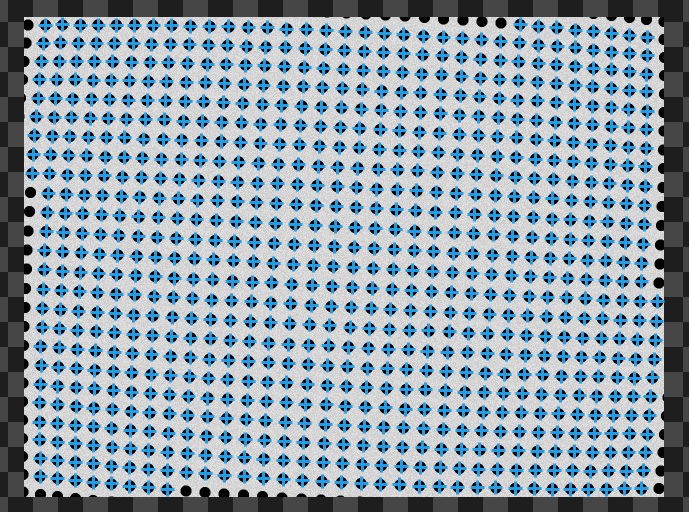
Detected calibration points
Remarks
The circle pattern must be a rectangular grid, with equal spacing in both dimensions.
Works only for slightly distorted images (circles cannot appear as ellipses).
Complexity Level
This filter is available on Basic Complexity Level.
Filter Group
This filter is member of DetectCalibrationGrid filter group.
See Also
- DetectCalibrationGrid_Chessboard – Detects a chessboard calibration grid on the image, and returns calibration points where 4 chessboard squares meet.
- DetectCalibrationGrid_CircleBoard – Detects a fixed-size symmetric circle calibration pattern on the image.