
Back to Adaptive Vision Library website
You are here: Start » Function Reference » Camera Calibration » DetectCalibrationGrid_CircleBoard
DetectCalibrationGrid_CircleBoard
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
Detects a fixed-size symmetric circle calibration pattern on the image.
Syntax
C++
C#
void avl::DetectCalibrationGrid_CircleBoard ( const avl::Image& inImage, const avl::Size& inBoardSize, float inWorldCircleSpacing, bool inFastApproximate, atl::Conditional<atl::Array<avl::Point2D>>& outImagePoints, atl::Conditional<atl::Array<avl::Point2D>>& outWorldPlanePoints )
Parameters
| Name | Type | Range | Default | Description | |
|---|---|---|---|---|---|
 |
inImage | const Image& | Input image | ||
|
inBoardSize | const Size& | Number of circles in X and Y dimensions. | ||
|
inWorldCircleSpacing | float | 0.0 -  |
1.0f | Real-world distance between adjacent circles centers. |
|
inFastApproximate | bool | False | Fast filter execution, but result is approximate. | |
 |
outImagePoints | Conditional<Array<Point2D>>& | Image coordinates of detected calibration points. | ||
|
outWorldPlanePoints | Conditional<Array<Point2D>>& | World plane coordinates of detected calibration points. |
Examples
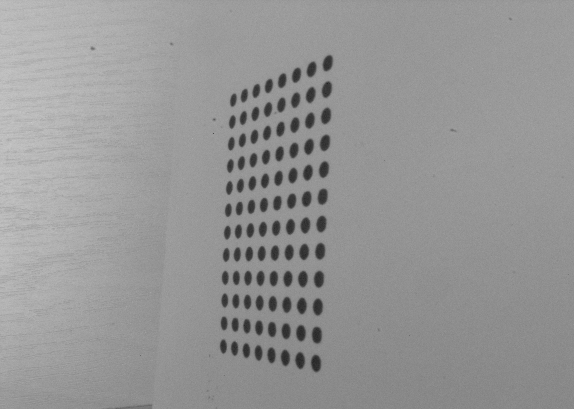
Input image for DetectCalibrationGrid_CircleBoard executed with inBoardSize = {12,8}
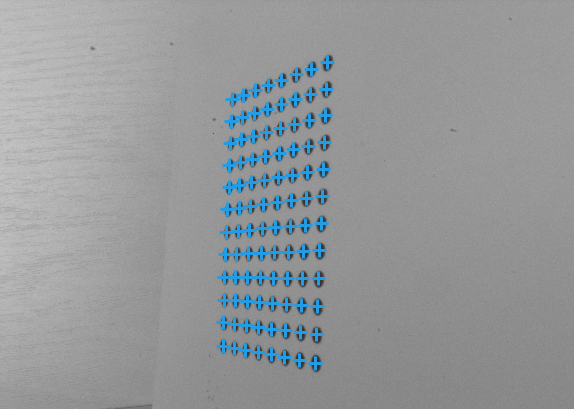
Detected calibration points
Errors
List of possible exceptions:
| Error type | Description |
|---|---|
| DomainError | Input image is too small |
| DomainError | Input image must have pixels of UInt8 type |
See Also
- DetectCalibrationGrid_Chessboard – Detects a chessboard calibration grid on the image, and returns calibration points where 4 chessboard squares meet.
- DetectCalibrationGrid_Circles – Detects an arbitrary size symmetric circle pattern on the image.