You are here: Start » Function Reference » Path » Polygon Features » PolygonOrientation
PolygonOrientation
| Header: | AVL.h |
|---|---|
| Namespace: | avl |
| Module: | FoundationBasic |
Computes the polygon orientation as angle with value in range 0.0 - 180.0.
Syntax
void avl::PolygonOrientation ( const avl::Path& inPolygon, float& outOrientationAngle )
Parameters


Description
Polygon orientation can be thought of as the direction in which the polygon is oriented. Mathematically it is the angle between X-axis and the line passing through the polygon mass center, that rotation around this line produces the smallest torque.
Note that if the input path is not a valid polygon (i.e. it has at least one self-intersection), the computation may lead to results that are not intuitive.
Examples
 |
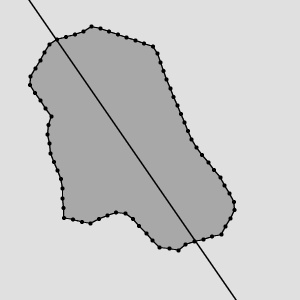 |
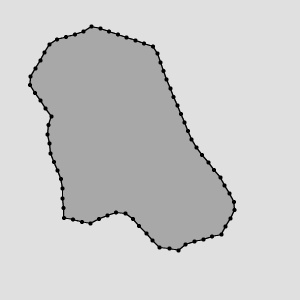
Orientation of the sample region equals to 55.386, which is visualized on the second image by drawing the line of this orientation passing through the mass center of the polygon.
Errors
List of possible exceptions:
| Error type | Description |
|---|---|
| DomainError | Degenerate polygon on input in PolygonOrientation. |
| DomainError | Open path on input in PolygonOrientation. |
See Also
- RegionOrientation – Computes the orientation of a region as an angle of value in a proper range.