
Image
Description
The Image data type stores information about dimensions, pixel format and raw pixel values. The list of possible formats is similar to the one from the OpenCV library – there can be from 1 to 4 channels and 6 possible primitive types. For maximum flexibility handling of specific color spaces is left to appropriate filters.

A single-channel image. |

A 3-channel RGB image. |

A 3-channel HSV image displayed as RGB. |
The Image structure contains the following fields:
- Width : Integer – number of pixel columns
- Height : Integer – number of pixel rows
- Pitch : Integer – byte-distance between consecutive rows
- Type : PlainType – type of pixel components
- Depth : Integer – number of channels
Possible pixel types are:
- SInt8 – integer number from -128 to 127
- UInt8 – integer number from 0 to 255
- SInt16 – integer number from -32768 to 32767
- UInt16 – integer number from 0 to 65535
- SInt32 – Integer number from -2147483648 to 2147483647
- Real – Real number
Note that the vast majority of images use the UInt8 type.
Geometrical Coordinates
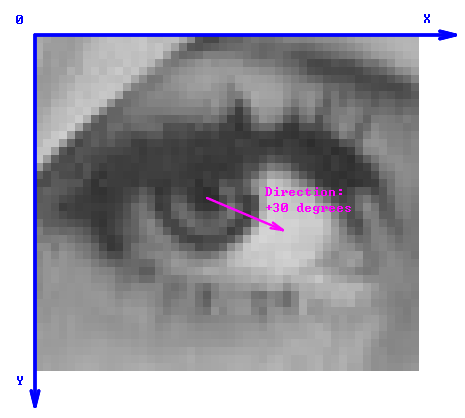
If w and h are the image dimensions, then all real-valued coordinates within the image are included in the ranges from 0.0 to w and from 0.0 to h. The top left pixel of the image covers the square area with the top-left corner at (0.0, 0.0) and the bottom-right corner at (1.0, 1.0). The X axis is directed to the right, the Y axis downwards.
Angles are denoted in degrees. For directions, the angle 0 denotes the direction of the X axis, i.e. the direction from left to right. The angles increase in the clock-wise manner.
Remarks
- A region of interest, if required, is supposed to be provided as a separate object.
- The channels of an image are interleaved.
- Single image can allocate no more than 2GB of memory.
- Maximum image single dimension is 65535 (because regions use 16-bit integers for performance reasons).
- All pixel rows are guaranteed to start at a 16 bytes-aligned memory address.
See also Pixel.